Root Locus Effect of Addition of zeros
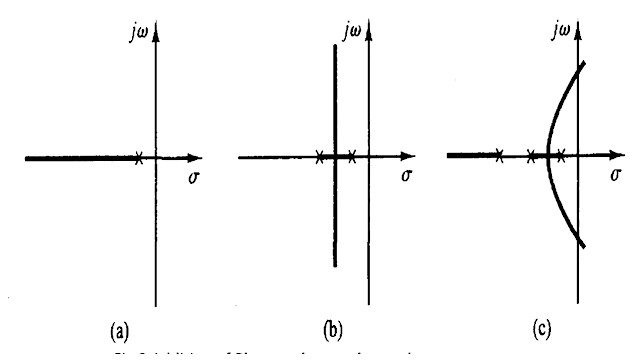
Root Locus Effect of Addition of zeros Addition of zeros The addition of a zero to the open-loop transfer function has the effect of pulling the root locus to the left, tending to make the system more stable and to speed up the settling of the response. Physically, the addition of a zero in the feed forward transfer function means the addition of derivative control to the system. The effect of such control is to introduce a degree of anticipation into the system and speed up the transient response. The Figure 1(a) shows the root loci for a system that is stable for small gain but unstable for large gain. Figures 1(b), (c), and (d) show root-locus plots for the system when a zero is added to the open-loop transfer function. It becomes stable for all values of gain. However, it is not possible to add an isolated zero to a transfer function because of physical non-realizability. Therefore, in order to realize the compensating network a pair of pole-zero has to be incorporated.