Stepper Motor Working Principle, Advantages, disadvantages and applications
Stepper Motor
A stepper motor, also known as step motor or stepping motor, is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can be commanded to move and hold at one of these steps without any position sensor for feedback (an open-loop controller), as long as the motor is correctly sized to the application in respect to torque and speed.
Stepper Motor Working Principle
Stepper motors are DC motors that move in discrete steps. They have multiple coils that are organized in groups called “phases”. By energizing each phase in sequence, the motor will rotate, one step at a time. With a computer controlled stepping you can achieve very precise positioning and/or speed control. For this reason, stepper motors are the motor of choice for many precision motion control applications.
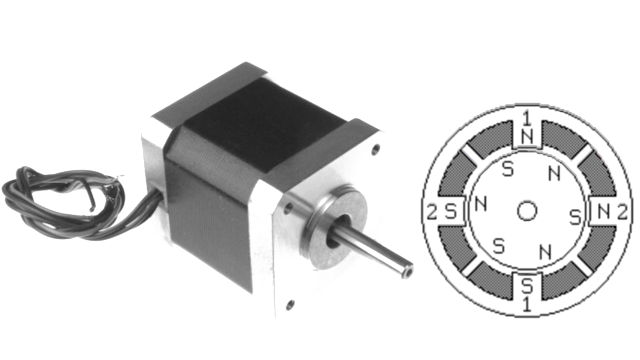
Stepper Motor Operation
Stepper motors work in very specific way, a standard stepper motor will have two or more coils that charge and discharge when electricity is allowed to flow through them. The animation below illustrates that. When the coils are charged and discharged in a specific pattern (usually sequentially), it creates an electromagnetic attraction between the coil and the motor. When this occurs fast enough it makes the stepper motor turn, and we get the movement.
Types of Stepper Motor
- Permanent magnet stepper
- Hybrid synchronous stepper
- Variable reluctance stepper
Permanent Magnet Stepper Motor
Permanent magnet motors use a permanent magnet (PM) in the rotor and operate on the attraction or repulsion between the rotor PM and the stator electromagnets. This is the most common type of stepper motor as compared with different types of stepper motors available in the market. This motor includes permanent magnets in the construction of the motor. This kind of motor is also known as tin-can/can-stack motor. The main benefit of this stepper motor is less manufacturing cost. For every revolution, it has 48-24 steps.
Hybrid Synchronous Stepper Motor
Hybrid stepper motors are named because they use a combination of permanent magnet (PM) and variable reluctance (VR) techniques to achieve maximum power in small package sizes. The most popular type of motor is the hybrid stepper motor because it gives a good performance as compared with a permanent magnet rotor in terms of speed, step resolution, and holding torque. But, this type of stepper motor is expensive as compared with permanent magnet stepper motors. This motor combines the features of both the permanent magnet and variable reluctance stepper motors. These motors are used where less stepping angle is required like 1.5, 1.8 & 2.5 degrees.
Variable Reluctance Stepper Motor
Variable reluctance (VR) motors have a plain iron rotor and operate based on the principle that minimum reluctance occurs with minimum gap, hence the rotor points are attracted toward the stator magnet poles. The stepper motor like variable reluctance is the basic type of motor and it is used for the past many years. As the name suggests, the rotor’s angular position mainly depends on the magnetic circuit’s reluctance that can be formed among the teeth of the stator as well as a rotor.
Advantages of Stepper Motor
- Positioning – Since steppers move in precise repeatable steps, they excel in applications requiring precise positioning such as 3D printers, CNC, Camera platforms and X,Y Plotters. Some disk drives also use stepper motors to position the read/write head.
- Speed Control – Precise increments of movement also allow for excellent control of rotational speed for process automation and robotics.
- Low Speed Torque – Normal DC motors don’t have very much torque at low speeds. A Stepper motor has maximum torque at low speeds, so they are a good choice for applications requiring low speed with high precision.
Disadvantages of Stepper Motor
- Low Efficiency – Unlike DC motors, stepper motor current consumption is independent of load. They draw the most current when they are doing no work at all. Because of this, they tend to run hot.
- Limited High Speed Torque – In general, stepper motors have less torque at high speeds than at low speeds. Some steppers are optimized for better high-speed performance, but they need to be paired with an appropriate driver to achieve that performance.
- No Feedback – Unlike servo motors, most steppers do not have integral feedback for position. Although great precision can be achieved running ‘open loop’. Limit switches or ‘home’ detectors are typically required for safety and/or to establish a reference position.
Applications
- Industrial Machines – Stepper motors are used in automotive gauges and machine tooling automated production equipment.
- Security – new surveillance products for the security industry.
- Medical – Stepper motors are used inside medical scanners, samplers, and also found inside digital dental photography, fluid pumps, respirators, and blood analysis machinery.
- Consumer Electronics – Stepper motors in cameras for automatic digital camera focus and zoom functions.
Really liked the content on the blog !! If you are interested in checking out my website, I have attached the link below
ReplyDeleteURL: https://mechtex.com/hybrid-stepper-motor Do like and comment :)